Hash table’da collision’ni bartaraf qilish. Separate chaining va Linear probing
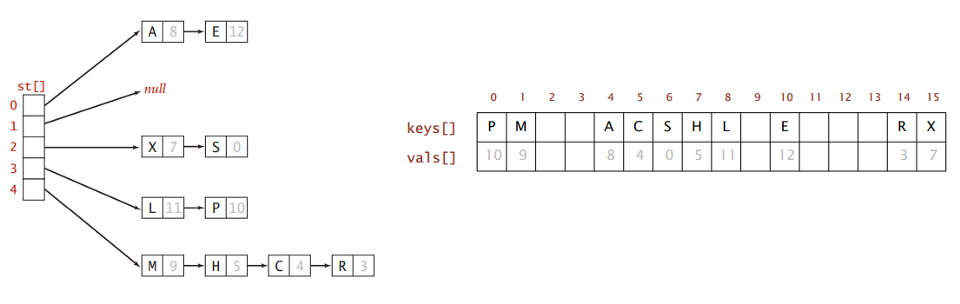
Agar biz o’zimiz hash funksiya yozadigan bo’lsak, albatta collision’da nima qilish kerakligini ham aniqlab olishimiz kerak. Collision’ning yechimi sifatida ikki usul keltirilgan: Separate chaining va Linear probing.