2D rectangle intersection search

2D rectangle intersection search deb, berilgan N ta to'g'ri to'rtburchaklar orasidan ustma-ust tushganlarini topishga aytiladi.
Dasturchi, frilanser, gik va introvert
2D rectangle intersection search deb, berilgan N ta to'g'ri to'rtburchaklar orasidan ustma-ust tushganlarini topishga aytiladi.

1D interval search (1D interval qidiruv) deb berilgan interval asosida u bilan kesishadigan boshqa intervallarni topishga aytiladi.
1d range search (one dimension range search, bir o'lchamli oraliq qidiruv) deb, ro'yxatdan berilgan oraliqda yotgan elementlarni topishga aytiladi.

AVL-Tree'ga tegishli bo'lgan amallar to'rtta - chapga burish; o'ngga burish; avval chapga, keyin o'ngga burish; avval o'ngga, keyin chapga burish. Ular haqida avvalgi maqolada to'xtalganimiz bois, bu yerda faqat kod yozish bilan cheklanamiz.
AVL-tree (kashfiyotchilari Adelson-Velsky va Landis'lardan olingan) yana bir balanslangan binary search tree. AVL-tree'ga o'tishdan oldin, balanced binary tree haqida eslab olamiz.

B-tree 2-3 tree'ga o'xshash, ammo bir necha jihatlar bilan farqlanadi. Har bir node'da M-1 gacha key qo'shiladi. Bunda M bitta blokdagi ma'lumotlar soni.
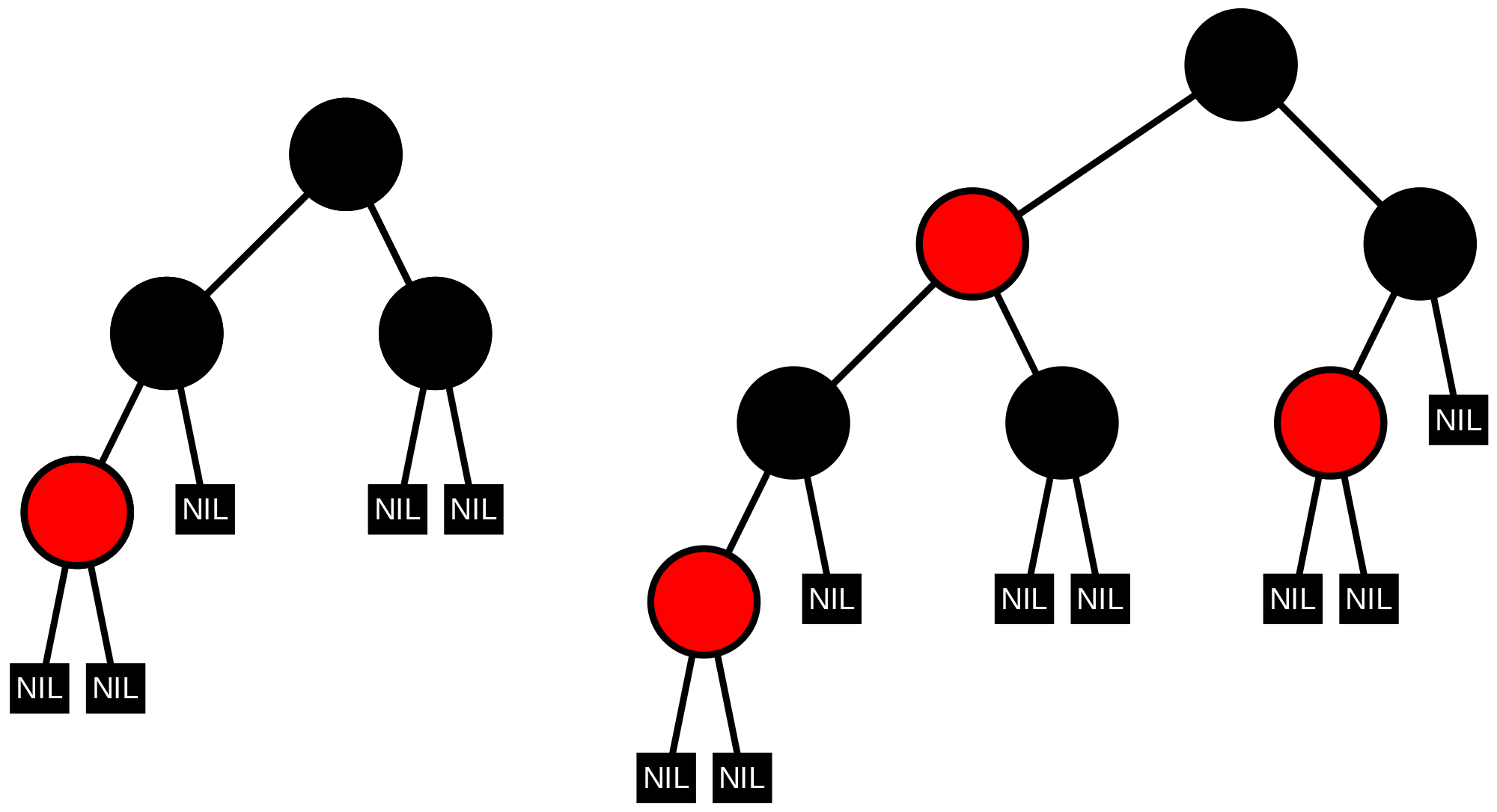
Red-black tree'dagi node'ning binary search tree node'idan farqi - unga color atributi qo'shilgan. Color node'ning qizil yoki qizilmas ekanini aniqlash uchun kerak bo'ladi.
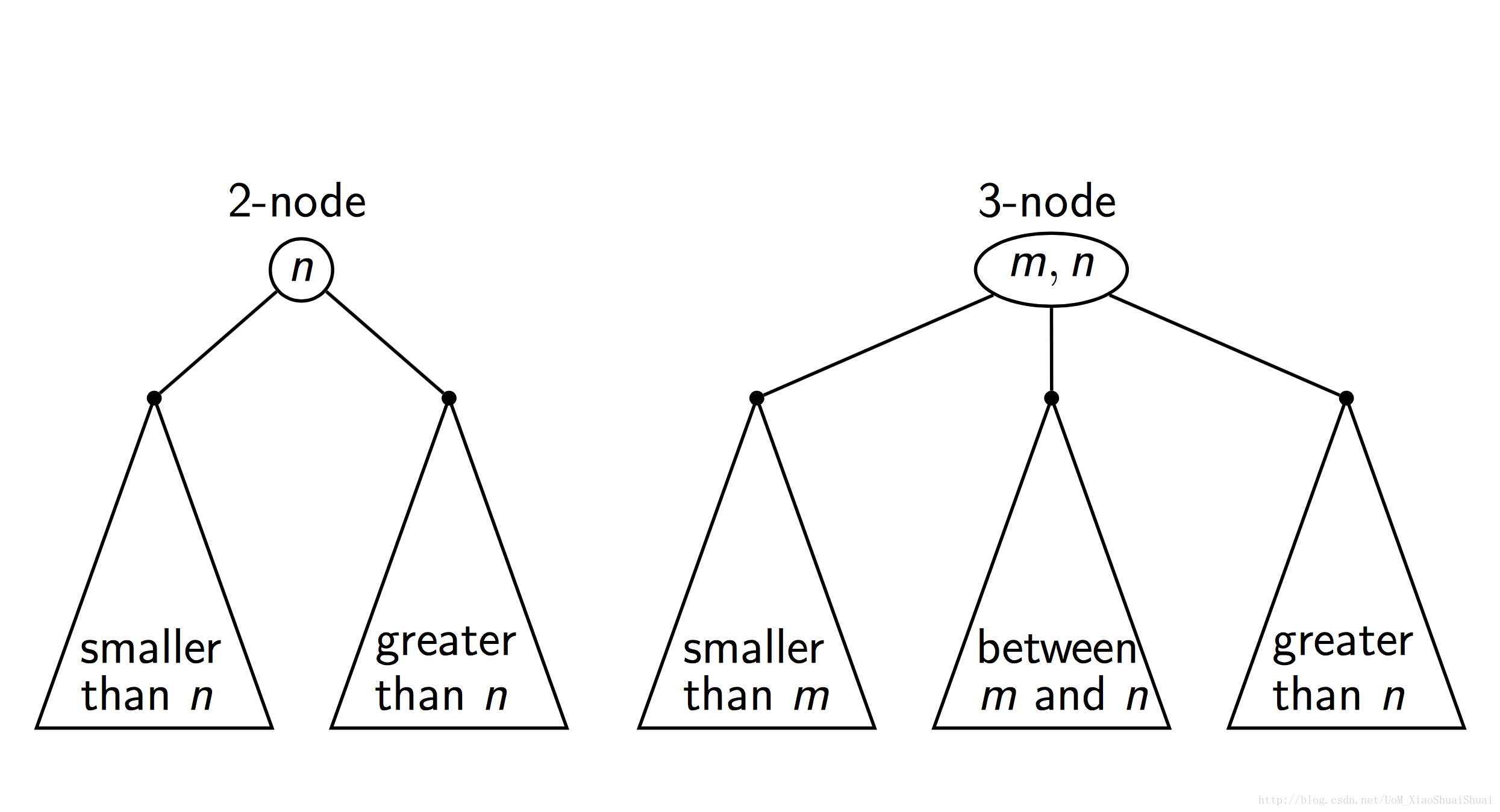
2-3 tree haqida tanishib chiqqan bo'lsangiz, unda node qo'shishda ko'p shartlarni hisobga olish kerak bo'lardi. Umuman, 2-3 tree'ni kodda ifodalash qiyin edi. Red-black tree mana shu insertdagi qiyinchiliklarga yechim sifatida keladi.
Balanced search tree'da biz binary search tree'ning uzunligini kamaytirish hisobiga, worst case'ni O (log N) gacha tushiramiz.
BSTga element qo'shish, o'chirish, qidirish, maksimum/minimum elementni chiqarish uchun API yozamiz. APIning tuzilishi quyidagicha bo'ladi.